Восстановление непрерывных данных.
Вначале рассмотрим построение регрессионного сплайна для интегрируемой на \([a,b]\) функции \(x(t)\), то есть для фиксированного разбиения \(\Delta_n\)
найдем решение задачи
\[
\min\left\{\left.\int_a^b\left(x(t)-\ell(t)\right)^2dt\right|\ell(t)\in S_{2}(\Delta_n)\right\}
\]
В соответствии с теоремой Холлидея (см.,
например, с. 155) для \(f\in C^r,\,r=1,2,...\)
имеет место соотношение
\[
\min\left\{\left.\int_a^b\left(f^{(r)}(t)-\ell^{(r)}(t)\right)^2dt\right|\ell(t)\in S_{2r-1}(\Delta_n)\right\}=
\int_a^b\left(f^{(r)}(t)-s_{2r-1}^{(r)}(x,\Delta_n,t)\right)^2dt,
\]
таким образом,
\begin{equation}\label{holliday}
\min\left\{\left.\int_a^b\left(x(t)-\ell(t)\right)^2dt\right|\ell(t)\in S_{2}(\Delta_n)\right\}=
\int_a^b\left(X(t)-s_5^{(3)}(X,\Delta_n,t)\right)^2dt
\end{equation}
где \(X(t)\) третья первообразная \(x(t)\) такая, что \(X''(a)=0\), \(X'(a)=0\) и \(X(a)=0.\)
Таким образом, путь к решению поставленной задачи лежит через построение интерполяционного сплайна пятой степени.
Легко убедиться в том, что интерполяционный для функции \(f(t)\) сплайн пятой степени для \(t\in [t_{i-1},t_i]\) имеет вид
\begin{equation}\label{s:5}
s_5(x,\Delta_n,t)=f_{{i -1}} \left( 1-\tau \right) ^{2} \left( 1+2\,\tau \right) +f_{{i }}{\tau
}^{2} \left( 3-2\,\tau \right) +m_{{i -1}}\tau \left( 1-\tau \right) ^{2}h_{{i -1/2}}-m_{{i }}{\tau}^{2}
\left( 1-\tau \right) h_{i -1/2}+
\end{equation}
\[+{\tau}^{2} \left( 1-\tau \right) ^{2} \left( \left( 0.5\,h_{i -1/2}^{2}
\left( M_{{i }}-M_{{i -1}} \right) +6\,(f_{{i }}-\,f_{{i-1 }})-3\,
\left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) \tau+ 0.5\,M_
{{i -1}}h_{i -1/2}^{2}+3(\,f_{{i -1}}-f_{{i }})+ \left( 2\,m_
{{i -1}}+m_{{i }} \right) h_{i -1/2} \right)
\]
Здесь \(\tau=\frac{t-t_{i-1}}{h_{i-1/2}}\), \(h_{i-1/2}=t_i-t_{i-1}\), \(f_i=f(t_i)\), \(m_i=s'_5(t_i)\) и \(M_i=s''_5(t_i).\)
Выпишем производные данного сплайна.
Первая производная будет иметь вид
\[
s'_5(x,\Delta_n,t)=-2\,f_{{i -1}} \left( 1-{\tau} \right)
\left( 1+2\,{\tau} \right) h_{i -1/2}^{-1
}+2\,f_{{i -1}} \left( 1-{\tau} \right) ^{2}h_{i -1/2}^{-1}+2\,f_{{i }}\tau\, \left( 3-2\,{\tau} \right) h_{i -1/2}^{-1}-
2\,{\frac {f_{{i }}{\tau}^{2}}{h_{i -1/2}}}+\]
\[+m_{{i -1}} \left( 1-{\tau} \right) ^{2}-2\,m_{{i -1}}\tau\, \left( 1-{\tau} \right) -2\,m_{{i }}\tau\,
\left( 1-\tau \right)+m_{{i }}{\tau}^{2}+\]
\[+2\,\tau\, \left( 1-\tau \right) ^{2} \left( \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{
i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right)
\tau+ 0.5\,M_{{i -1}}h_{i -1/2}^{2}+3\,f_{{i -
1}}-3\,f_{{i }}+ \left( 2\,m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}
} \right) h_{i -1/2}^{-1}-\]
\[-2\,{\tau}^{2} \left( 1-{\tau} \right) \left( { \left( 0.5\,h_{i -1/2}^{2
} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3
\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) \tau}+ 0.5\,M_{{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,x
_{{i }}+ \left( 2\,m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}}
\right) h_{i -1/2}^{-1}+\]
\[+{\tau}^{2} \left( 1-{\tau} \right) ^{2} \left( 0.5\,h_{i -1/2}^{2} \left( M_{{
i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{
i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-1}
\]
Упрощая, получаем
\[s'_5(x,\Delta_n,t)=
\frac{1}{2\,h_{i-1/2}}\,{ \left( - 60\,f_{{i -1}}+ 60\,f_{{i }}- 30\,h_{{i -1/2}}m_{{i -1}}+ 5\,h_{i -1/2}^{2}M_{{i }}-
5\,M_{{i -1}}h_{i -1/2}^{2}- 30\,h_{{i -1/2}}m_{{i }} \right) {\tau}^{4}}+\]
\[+ \frac{1}{2\,h_{i-1/2}}\,{
\left( - 8\,h_{i -1/2}^{2}M_{{i }}+ 64\,h_{i -1/2}
m_{{i -1}}+ 12\,M_{{i -1}}h_{i -1/2}^{2}+ 56\,{h_{{i -1/2}
}}m_{{i }}+ 120\,f_{{i -1}}- 120\,f_{{i }} \right) {\tau}^{3}}+ \]
\[+\frac{1}{2\,h_{i-1/2}}\,{ \left( - 9\,M_{{i -1}}h_{i -1/2}^{2}- 24\,{h_{{i -1/2}}}m_{{i }}- 60\,f_{{i -1}}-
36\,m_{{i -1}}h_{i -1/2}+ 3\,h_{i -1/2}^{2}M_{{i }}+ 60\,f_{{i }} \right) {\tau}^{2}}+
M_{{i -1}}\,h_{i -1/2}\tau+ m_{{i -1}}
\]
Вторая производная будет равна
\[
s_5^{(2)}(x,\Delta_n,t)=2\,f_{{i -1}} \left( 1+2\,{\tau} \right) h_{i -1/2}^{-2}-8\,f_{{i -1}} \left( 1-{\tau}
\right) h_{i -1/2}^{-2}+2\,f_{{i }} \left( 3-2\,{\tau} \right) h_{i -1/2}^{-2}-8\,{\frac {f_{{i }}\tau}{
h_{i -1/2}^{2}}}-\]
\[-4\,m_{{i -1}} \left( 1-\tau \right) h_{i -1/2}^{-1}+2\,{\frac {m_{{i -1}}\tau}{h_{i -1/2}^{2}}}-2\,m_{{i }} \left( 1-{\tau}\right) h_{i -1/2}^{-1}+4\,{\frac {m_{{i }}\tau}{h_{i -1/2}^{2}}}+\]
\[+2\, \left( 1-{\tau} \right) ^{2}
\left( { \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{
{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m
_{{i }} \right) h_{{i -1/2}} \right) \tau}+ 0.5\,M_{
{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,f_{{i }}+ \left( 2\,m_{
{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-2}-\]
\[-
8\,\tau\, \left( 1-{\tau} \right) \left( { \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}}
\right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }}
\right) h_{{i -1/2}} \right) \tau}+ 0.5\,M_{{i -1}}
h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,f_{{i }}+ \left( 2\,m_{{i -1}}
+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-2}+\]
\[+4\,\tau
\, \left( 1-{\tau} \right) ^{2} \left( 0.5\,{h
_{{i -1/2}}}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}
+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-2}+\]
\[+2\,{\tau}^{2} \left( { \left(
0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{
{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i
-1/2}} \right) \tau}+ 0.5\,M_{{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,f_{{i }}+ \left( 2\,m_{{i -1}}+m_{{i }}
\right) h_{{i -1/2}} \right) h_{i -1/2}^{-2}-\]
\[-4\,{\tau}^{2}
\left( 1-{\tau} \right) \left( 0.5\,{h_{{i
-1/2}}}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_
{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-2}
\]
После упрощений получаем
\[s_5^{(2)}(x,\Delta_n,t)=
\frac{1}{h_{i-1/2}^2}\,{ \left( - 120\,f_{{i -1}}+ 10\,h_{i -1/2}^{2}M_{{i
}}+ 120\,f_{{i }}- 10\,M_{{i -1}}h_{i -1/2}^{2}- 60\,h_{{
i -1/2}}m_{{i }}- 60\,h_{{i -1/2}}m_{{i -1}} \right) {\tau}^{3}}+\]
\[
+\frac{1}{h_{i-1/2}^2}\,{ \left( 84\,h_{i -1/2}m_{{
i }}- 12\,h_{i -1/2}^{2}M_{{i }}+ 18\,M_{{i -1}}h_{i -1/2}^{2}+ 180\,f_{{i -1}}- 180\,f_{{i }}
+ 96\,h_{i -1/2}m_{{i -1}} \right) {\tau}^{2}}+\]
\[
+\frac{1}{h_{i-1/2}^2}\,
{ \left( - 9\,M_{{i -1}}h_{i -1/2}^{2}- 24\,h_{i -1/2}m_{{i }}- 60\,f_{{i -1}}- 36\,m_{{i -1}}h_{i -1/2}+
3\,h_{i -1/2}^{2}M_{{i }}+ 60\,f_{{i }} \right) \tau}+M_{{i -1}}
\]
Третья
\[
s_5^{(3)}(x,\Delta_n,t)=12\,{\frac {f_{{i -1}}}{h_{i -1/2}^{3}}}-12\,{\frac {f_{{i }}}{
h_{i -1/2}^{3}}}+6\,{\frac {m_{{i -1}}}{h_{i -1/2}^{2}}}+6
\,{\frac {m_{{i }}}{h_{i -1/2}^{2}}}-\]
\[-
12\, \left( 1-\tau \right) \left( { \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}
-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) \tau}+ 0.5\,M_{{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3
\,f_{{i }}+ \left( 2\,m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-3}+\]
\[+6\, \left( 1-{\tau} \right) ^{2} \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{
i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_
{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-3}+\]
\[+12\,\tau\,
\left( { \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{
{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m
_{{i }} \right) h_{{i -1/2}} \right) \tau}+ 0.5\,M_{
{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,f_{{i }}+ \left( 2\,m_{
{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-3}-\]
\[-
24\,\tau\, \left( 1-{\tau} \right) \left( 0.5
\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i
-1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-3}+6\,{\frac {{\tau}^{2} \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+
6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) }{h_{i -1/2}^{3}}}
\]
После несложных преобразований получаем
\[s_5^{(3)}(x,\Delta_n,t)=
\frac{3}{h_{i-1/2}^3}\,{ \left( - 120\,f_{{i -1}}+ 10\,h_{i -1/2}^{2}M
_{{i }}+ 120\,f_{{i }}- 10\,M_{{i -1}}h_{i -1/2}^{2}- 60
\,h_{{i -1/2}}m_{{i }}- 60\,h_{{i -1/2}}m_{{i -1}} \right) {\tau
}^{2}}+
\]
\[+ \frac{3}{h_{i-1/2}^3}\,{ \left( - 8\,{h_{{i -1/2}}}^{2}M_{{i }}+ 64\,h_{i -1/2}m_{{i -1}}+ 12\,M_{{i -
1}}h_{i -1/2}^{2}+ 56\,h_{i -1/2}m_{{i }}+ 120\,f_{{i -1}}- 120\,f_{{i }} \right) \tau}+\]
\[+
\frac{3}{h_{i-1/2}^3}\, \left( {- 12\,m_{{i -1}}h_{i -1/2}- 8\,h_{i -1/2}m_{{i }}- 20\,f_{{i -1}}
- 3\,M_{{i -1}}h_{i -1/2}^{2}+ 20\,f_{{i }}+h_{i -1/2}^{2}M_{{i }}}\right).
\]
и, наконец, четвертая производная сплайна будет иметь вид
\[
s_5^{(4)}(x,\Delta_n,t)=24\, \left({ \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}
-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{i }}-3\, \left( m_{{i -1
}}+m_{{i }} \right) h_{{i -1/2}} \right) \tau}+ 0.5
\,M_{{i -1}}h_{i -1/2}^{2}+3\,f_{{i -1}}-3\,f_{{i }}+ \left( 2
\,m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^
{-4}-\]
\[-48\, \left( 1-{\tau} \right) \left( 0.5
\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i
-1}}+6\,f_{{i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right) h_{i -1/2}^{-4}+48\,{\frac { \left( 0.5\,h_{i -1/2}^{2} \left( M_{{i }}-M_{{i -1}} \right) -6\,f_{{i -1}}+6\,f_{{
i }}-3\, \left( m_{{i -1}}+m_{{i }} \right) h_{{i -1/2}} \right)
\tau}{h_{i -1/2}^{4}}}
\]
После преобразований, имеем
\[s_5^{(4)}(x,\Delta_n,t)=
\frac{12}{h_{i-1/2}^4}\,{ \left( - 60\,f_{{i -1}}+ 60\,f_{{i }}- 30\,h_{{i -1/2}}m_{{i }}- 5\,M_{{i -1}}h_{i -1/2}^{2}- 30\,h_{{i -1/2}}m_{{i -1}}+ 5\,h_{i -1/2}^{2}M_{{i }} \right) \tau}+\]
\[+ \frac{12}{h_{i-1/2}^4}\,\left({ 3\,M_{{i -1}}h_{i -1/2}^{2}+ 16\,h_{i -1/2}m_{{i -1}}- 30\,f_{{i }}+ 30\,f_{{i -1}}+
14\,h_{i -1/2}m_{{i }}- 2\,h_{i -1/2}^{2}M_{{i }}}\right).
\]
Заметим, что
\[
s_5^{(3)}(x,\Delta_n,t_i-0)=
3\,{\frac {- 20\,f_{{i -1}}+ 20\,f_{{i }}- 8\,h_{{i -1/2}}
m_{{i -1}}- 12\,h_{{i -1/2}}m_{{i }}+ 3\,h_{i -1/2}^{2}M_{
{i }}- 1\,M_{{i -1}}h_{i -1/2}^{2}}{h_{i -1/2}^{3}}},
\]
и
\[s_5^{(3)}(x,\Delta_n,t_i+0)=
- 3\,{\frac { 20\,f_{{i }}- 20\,f_{{i +1}}+ 12\,h_{{i +1/2}}
m_{{i }}+ 8\,h_{{i +1/2}}m_{{i +1}}+ 3\,M_{{i }}h_{i +1/2}^{2}- 1\,M_{{i +1}}h_{i +1/2}^{2}}{h_{i +1/2}^{3}}}
\]
Тогда условие непрерывности третьей производной сплайна в точке \(t_i\): \(s_5^{(3)}(x,\Delta_n,t_i+0)=s_5^{(3)}(x,\Delta_n,t_i-0)\) будет равно
\[
3\,{\frac {- 20\,f_{{i -1}}+ 20\,f_{{i }}- 8\,h_{{i -1/2}}
m_{{i -1}}- 12\,h_{{i -1/2}}m_{{i }}+ 3\,h_{i -1/2}^{2}M_{
{i }}- 1\,M_{{i -1}}h_{i -1/2}^{2}}{h_{i -1/2}^{3}}}=-
3\,{\frac { 20\,f_{{i }}- 20\,f_{{i +1}}+ 12\,h_{{i +1/2}}
m_{{i }}+ 8\,h_{{i +1/2}}m_{{i +1}}+ 3\,M_{{i }}h_{i +1/2}^{2}- 1\,M_{{i +1}}h_{i +1/2}^{2}}{h_{i +1/2}^{3}}}
\]
Отсюда, условие непрерывности третьей производной будет
\begin{equation}\label{e:1}
M_{i-1}\frac{1}{h_{i-1/2}}-
3\,M_i\left(\frac{1}{h_{i-1/2}}+\frac{1}{h_{i+1/2}}\right)+M_{i+1}\frac{1}{h_{i+1/2}}
+8\,m_{i-1}\frac{1}{h_{i-1/2}^2}+12\,m_i\left(\frac{1}{h_{i-1/2}^2}-\frac{1}{h_{i+1/2}^2}\right)-8\,m_{i+1}\frac{1}{h_{i+1/2}^2}=
\end{equation}
\[=
-20f_{i-1}\frac{1}{h_{i-1/2}^3}+20\,f_i\left(\frac{1}{h_{i-1/2}^3}+\frac{1}{h_{i+1/2}^3}\right)-20f_{i+1}\frac{1}{h_{i+1/2}^3},
(i=1,...,n-1).
\]
Условие непрерывности четвертой производной будет в узле \(t_i\): \(s_5^{(4)}(x,\Delta_n,t_i+0)=s_5^{(4)}(x,\Delta_n,t_i-0)\)
\[
12\,{\frac { 3\,h_{i -1/2}^{2}M_{{i }}- 30\,f_{{i -1}}+ 30\,f_{{i }}- 14\,h_{{i -1/2}}m_{{i -1}}- 16\,h_{{i -1/2}}m_{{i }}- 2\,M_{{i -1}}h_{i -1/2}^{2}}{h_{i -1/2}^{4}}}=
12\,{\frac { 3\,M_{{i }}h_{i +1/2}^{2}+ 30\,f_{{i }}- 30\,f_{{i +1}}+ 16\,h_{{i +1/2}}m_{{i }}+ 14\,h_{{i +1/2}}m_{{i +1}}- 2\,M_{{i +1}}h_{i +1/2}^{2}}{h_{i +1/2}^{4}}}
\]
Отсюда получаем условие непрерывности четвертой производной сплайна
\begin{equation}\label{e:2}
2\,M_{i-1}\frac{1}{h_{i-1/2}^2}-3\,M_i\left(\frac{1}{h_{i-1/2}^2}-\frac{1}{h_{i+1/2}^2}\right)-2\,M_{i+1}\frac{1}{h_{i+1/2}^2}
+14\,m_{i-1}\frac{1}{h_{i-1/2}^3}+16\,m_i\left(\frac{1}{h_{i-1/2}^3}+\frac{1}{h_{i+1/2}^3}\right)+14\,m_{i+1}\frac{1}{h_{i+1/2}^3}=
\end{equation}
\[
-30\,f_{i-1}\frac{1}{h_{i-1/2}^4}+30\,f_i\left(\frac{1}{h_{i-1/2}^4}-\frac{1}{h_{i+1/2}^4}\right)+30\,f_{i+1}\frac{1}{h_{i+1/2}^4},
(i=1,...,n-1).\]
Решая систему линейных уравнений (\ref{e:1}) и (\ref{e:2}), находим значения \(M_i\) и \(m_i\) \(i=1,...,n-1\), которые
позволяют получить сплайн (\ref{s:5}).
Подведем итог.
Таким образом, если \(X(t)\) третья первообразная \(x(t)\) такая, что \(X''(a)=0\), \(X'(a)=0\) и \(X(a)=0\), то для фиксированного
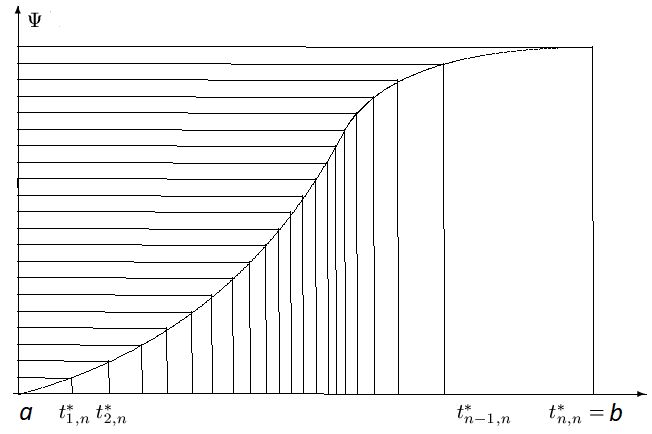
разбиения \(\Delta_n=\left\{a=t_{0}\lt t_{1}\lt\ldots \lt t_{n-1}\lt t_{n}=b\right\} \) и множества \(\{X_i\}_{i=0}^n\), где \(X_i=X(t_i)\),
параболический регрессионный сплайн ( третья производная (\ref{holliday}) интерполяционного сплайна пятой степени \(s_5(X,\Delta_n)\)) для \(t\in[t_{i-1},t_i]\) будет иметь вид
\begin{equation}\label{regression}
\tilde{s}_2(x,\Delta_n,t)=
30\,{\frac { \left(12\,(X_{{i }}-X_{i-1})
- 6\,h_{{i -1/2}}(m_{{i -1}}+m_{{i }})+ h_{i -1/2}^{2}(M_i-M_{i-1}) \right) {\tau}^{2}}{h_{i -1/2}^{3}}}+
\end{equation}
\[+12\,{\frac { \left( - 30\,(X_{{i }}-X_{i-1})+
16\,h_{i -1/2}m_{{i -1}}+ 14\,h_{i -1/2}m_{{i }}- 2\,h_{i -1/2}^{2}M_{{i }}+ 3\,M_{{i -1}}h_{i -1/2}^{2} \right) \tau}{h_{i -1/2}^{3}}}+\]
\[+ 3\,{\frac { 20\,(X_{{i }}-X_{i-1})-
8\,m_{{i }}h_{i -1/2}- 12\,m_{{i -1}}h_{i -1/2}+h_{i -1/2}^{2}M_{{i }}
- 3\,M_{{i -1}}h_{i -1/2}^{2}}{h_{i -1/2}^{3}}}
\]
Восстановление дискретных данных с помощью параболической сплайн-регрессии.
Дано: \((z_i,\hat{x}_i), i=0,1,...,N,\) где \(z_i\in [a,b]\) и будем считать (аргумент всегда можно упорядочить), что \(z_{i-1}\lt z_i, i=1,...,N.\)
При этом \(a=z_0,b=z_N.\) Будем считать, что \(\hat{x}_i=x(z_i)\) и нужно получить восстановлением функции \(x(t)\) с помощью параболического регрессионного сплайна.
Тогда
\[
\hat{x}_i=\int_a^b{x(t)\delta(t-z_i)}dt=\hat{x}_i\int_E{\delta(t-z_i)}dt,
\]
где \(\delta(t)-\) дельта-функция Дирака, а \(E\subset [a,b]\) такое, что \(z_i\in E.\) Будем считать, что \(E_i=[z_{i},z_{i+1}).\) Тогда для \(t\in E_i\)
\[
\int_a^t\int_a^t{x(t)\delta(t-z_j)}dt=\int_a^t\sum_{j=0}^i\int_{E_j}{x(t)\delta(t-z_j)}dt,
\]
и для \(t\in E_i\)
\[
\mathcal{I}(t)=\int_a^t\int_a^t{x(t)\delta(t-z_j)}dt=\sum_{j=0}^i\hat{x}_j\chi(t-z_j),
\]
где \(\chi(t)\) - ступенька Хевисайда
\[
\chi(t)=\left\{
\begin{array}{ll}
0, & t\lt 0;\\
1, & t\ge 0.
\end{array}
\right.
\]
Это следует из того факта, что
\[
\chi(t)=\int_{-\infty}^t\delta(t)dt.
\]
Таким образом, \(\mathcal{I}(t)\) - кусочно-постоянная функция, принимающая значение \(\sum_{j=0}^i\hat{x}_j\) для \(t\in [z_{i},z_{i+1})\), то есть,
\[
\int\int{\mathcal{I}(t)}dt
\]
представляет собой параболический сплайн минимального дефекта \(\hat{s}_2(\{z_i\}_{i=0}^N,t)\) по разбиению \(\{z_i\}_{i=0}^N\), такой, что
\begin{equation}\label{sd2}
\hat{s}''_2(\{z_i\}_{i=0}^N,t)=\mathcal{I}(t).
\end{equation}
Для \(t\in [z_{i},z_{i+1})\) параболический сплайн по разбиению \(\{z_i\}_{i=0}^N\) можно записать в виде
\begin{equation}\label{spline_data}
2\,\mu_i \left( {\theta}^{2}- 0.5\,\theta \right) -4\,s_{i+1/2} \left( {\theta}^{2}- 0.25 \right) +2\,\mu_{{i+1}} \left( {\theta}^{2}+ 0.5\,\theta \right)
\end{equation}
где \(\mu_i\) - значение сплайна в узле \(z_i\), а \(s_{i+1/2}\) - его значение в точке \(z_{i+1/2}=(z_{i}+z_{i+1})/2\), а параметр
\(\theta\) равен \[\theta=\frac{t-z_{i+1/2}}{\hbar_{i+1/2}}, \hbar_{i+1/2}=z_{i+1}-z_{i}, i=0,1,...,N-1.\]
Для \(t\in [z_{i},z_{i+1})\) первая производная этого сплайна равна
\[
\frac {2\,\mu_i \left( 2\,\theta - 0.5 \right) -8\,s_{i+1/2}\theta +2\,\mu_{{
i+1}} \left( 2\,\theta + 0.5 \right) }{\hbar_{i+1/2}}
\]
и для \(t\to z_i+0\)
\[
{\frac {- 3\,\mu_i+ 4\,s_{i+1/2}- \,\mu_{i+1}}{\hbar_{i+1/2}}}
\]
а для \(t\to z_{i+1}-0\)
\[
{\frac { \,\mu_i- 4\,s_{i+1/2}+ 3\,\mu_{i+1}}{\hbar_{i+1/2}}}.
\]
Таким образом, условие непрерывности производной сплайна в точке \(z_i\) будет иметь вид
\[
{\frac {- 3\,\mu_i+ 4\,s_{i+1/2}- \,\mu_{i+1}}{\hbar_{i+1/2}}}=
{\frac {\mu_{{i-1}}- 4\,s_{i-1/2}+ 3\,\mu_i}{\hbar_{i-1/2}}}, i=1,...,N-1.
\]
или, что то же,
\[
\frac {\mu_{i+1}}{\hbar_{i+1/2}}+3\,\mu_i\left(\frac {1}{\hbar_{i+1/2}}+\frac {1}{\hbar_{i-1/2}}\right)+\frac {\mu_{i-1}}{\hbar_{i-1/2}}=
4\frac {s_{i+1/2}}{\hbar_{i+1/2}}+4\frac {s_{i-1/2}}{\hbar_{i-1/2}}, i=1,...,N-1.
\]
Решая эту систему, получаем значения сплайна \(\mu_i\), которые обеспечивают минимальный дефект.
Остается найти \(s_{i+1/2}\) \((i=0,...,N-1)\).
Это легко сделать из условия (\ref{sd2}).
Для \(t\in [z_{i},z_{i+1})\) вторая производная сплайна равна
\[
{\frac {4\,\mu_{{i}}-8\,s_{{i+1/2}}+4\,\mu_{{i+1}}}{\hbar_{i+1/2}^{2}}}=\sum_{j=0}^i\hat{x}_{j}
\]
тогда
\[s_{i+1/2}=-\frac{\hbar_{i+1/2}^2}{8}\sum_{j=0}^i\hat{x}_{j}+\frac{1}{2}(\mu_i+\mu_{i+1}).
\]
Таким образом, при \(t\in [z_{i},z_{i+1})\) для построения сплайна
\[
\hat{s}_2(\{z_i\}_{i=0}^N,t)=
2\,\mu_i \left( {\theta}^{2}- 0.5\,\theta \right) -4\,s_{i+1/2} \left( {\theta}^{2}- 0.25 \right) +2\,\mu_{{i+1}} \left( {\theta}^{2}+ 0.5\,\theta \right)
\]
нужно решить систему линейных уравнений
\begin{equation}\label{sys}
\frac {\mu_{i+1}}{\hbar_{i+1/2}}-\,\mu_i\left(\frac {1}{\hbar_{i+1/2}}+\frac {1}{\hbar_{i-1/2}}\right)+\frac {\mu_{i}}{\hbar_{i-1/2}}=
\frac {\hbar_{i+1/2}}{2}\sum_{j=0}^i\hat{x}_{j}+\frac {\hbar_{i-1/2}}{2}\sum_{j=0}^{i-1}\hat{x}_{j}, i=1,...,N-1.
\end{equation}
\[
\mu_0=0, \mu_N=\sum_{j=0}^{N}\hat{x}_{j}.
\]
Подведем итог. Для построения параболической сплайновой регрессии по набору данных \((z_i,\hat{x}_i), i=0,1,...,N,\) нужно
Решить систему (\ref{sys}), найти \(\mu_i\) и получить из (\ref{spline_data}) сплайн \(\hat{s}_2(\{z_i\}_{i=0}^N,t)\).
Для заданного разбиения \(\Delta_n=\left\{a=t_{0}\lt t_{1}\lt \ldots \lt t_{n-1}\lt t_{n}=b\right\} \) отрезка \([a,b]\)
найдем \(X_i=\hat{s}_2(\{z_i\}_{i=0}^N,t_i)\) и решая систему уравнений (\ref{e:1}) и (\ref{e:2}), находим значения \(M_i\) и \(m_i\) \(i=1,...,n-1\), которые позволяют получить регрессионный сплайн (\ref{regression}).